DJI Terraは、周辺環境のデータを取り込んで分析し、可視化できる簡単操作のマッピングソフトウェアです。これにより、産業分野の専門家は、業務現場の事例をデジタル資産へ変換することができます。
エリア マッピング1
3Dモデル
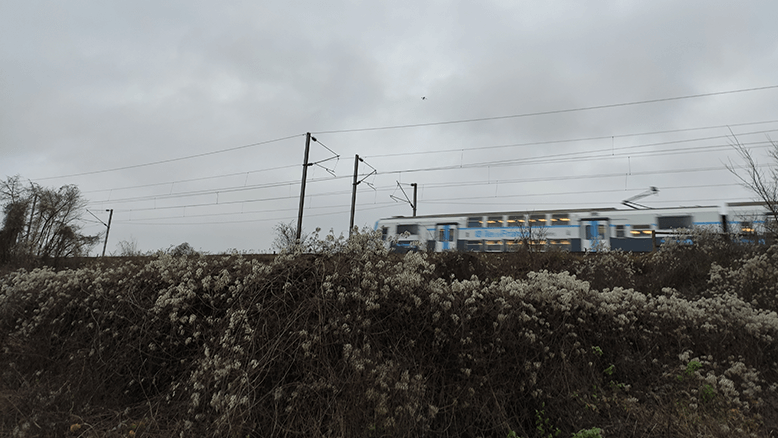
事故の再構築、大規模建設プロジェクトの進捗トラッキングなど、様々な産業分野全体に渡り、周囲の描写をシャープでリアルに捉えます。
モデルサンプルダウンロード400枚の写真/1GB2
(シングルコンピューター)
スケール
6,000枚の写真/1GB(クラスタ処理)
30,000枚の写真/3日3
(シングルコンピューター)
効率性
30,000枚/21時間4(クラスタ処理)
精度
センチメートルレベルの精度5
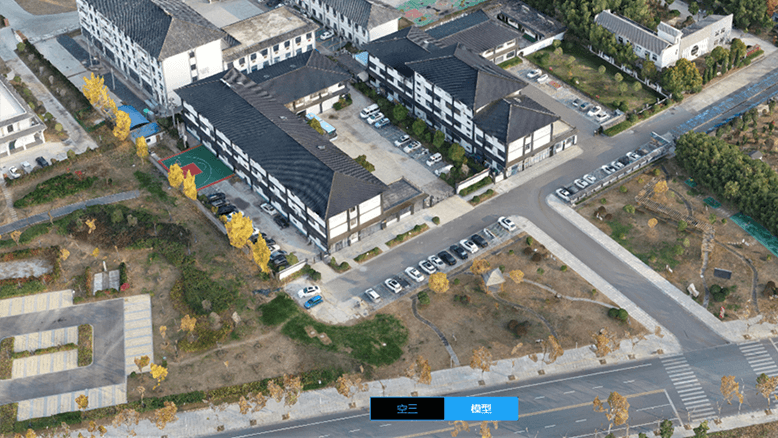
2Dマップ
高解像度オルソモザイクを生成し、すべての重要なプロジェクトで詳細で正確な測定結果を取得できます。
400枚の写真/1GB6
(シングルコンピューター)
スケール
6,000枚の写真/1GB(クラスタ処理)
5,000枚の写真/2時間7
(シングルコンピューター)
効率性
5,000枚/80分8(クラスタ処理)
精度
センチメートルレベルの精度
LiDAR
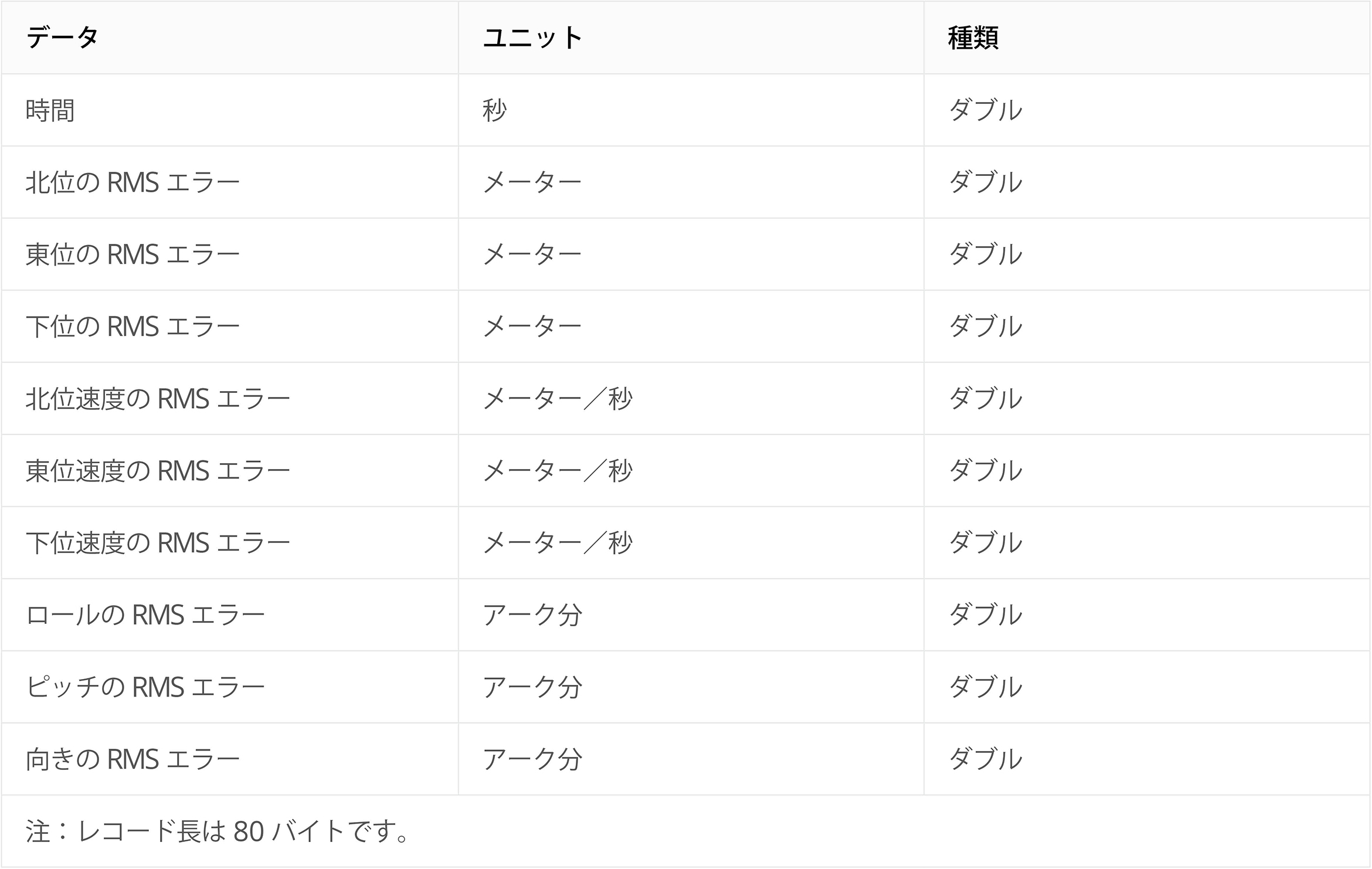
Zenmuse L1を使用して取得した点群データをDJI Terraで処理します。1度のクリックで、POSデータの計算、点群データと可視光画像データの融合、標準化されたフォーマットでの点群データのエクスポート、フィールドワーク レポートの作成を行います。
Multispectral9
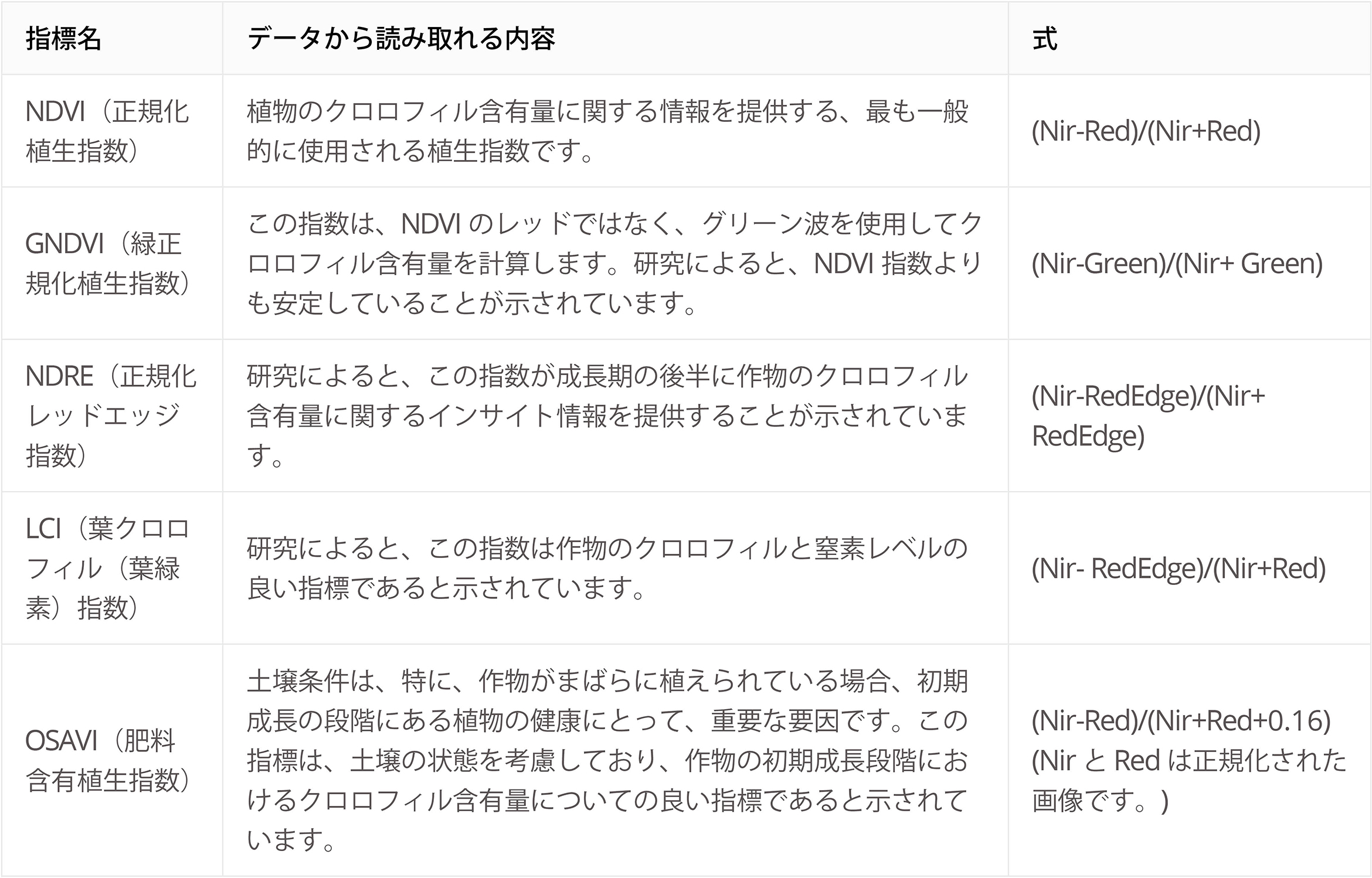
P4 Multispectralからのマルチスペクトラルデータを使用して、リモートセンシングリサーチなどのための、放射線測定でキャリブレーションされた反射率分布図を生成したり、NDVIおよびNDREを含む植生指標分布図を作成します。収穫量を改善し、植生の管理にも役に立つ実用的なインサイト情報を収集します。
その他のハイライト
リアルタイム 3Dマッピング10
効率性を優先する場面で、地図が作成された領域の3Dモデルをすばやくレンダリングして視覚化します。前もってモデルに基づいて決定を下し、すぐに完全なデータを確認するか、現場で3D飛行を計画することができます。リアルタイム マッピング
選択エリアの2Dオルソモザイクを、素早くリアルタイムで生成します。遠隔地域で詳細な飛行経路を作成するのに理想的であるだけでなく、現場で迅速な意思決定を必要とする一刻を争うミッションにも実用的です。詳細検査ミッション計画11
ローカル3Dモデルまたは点群(またはサードパーティの点群)で選択された1つ以上のポイントに基づいて、ウェイポイントと飛行経路を自動的に生成します。選択したポイントを含む、シミュレーションのカメラビューが画面に表示されます。ウェイポイントの選択を改善し、飛行経路計画を効率化し、調査ワークフローを自動化します。シームレス ワークフロー、正確な結果
優れた効率性とユーザーエクスペリエンス
直感的に使用できるように設計されたインターフェースを操作して、画像を簡単にインポートします。 複数のグラフィックカードを同時に使用して構築ミッションを実行し、効率を向上させます。
ステップ1

ステップ2

ステップ3
プロジェクトの基準を満たし、さらなる向上を
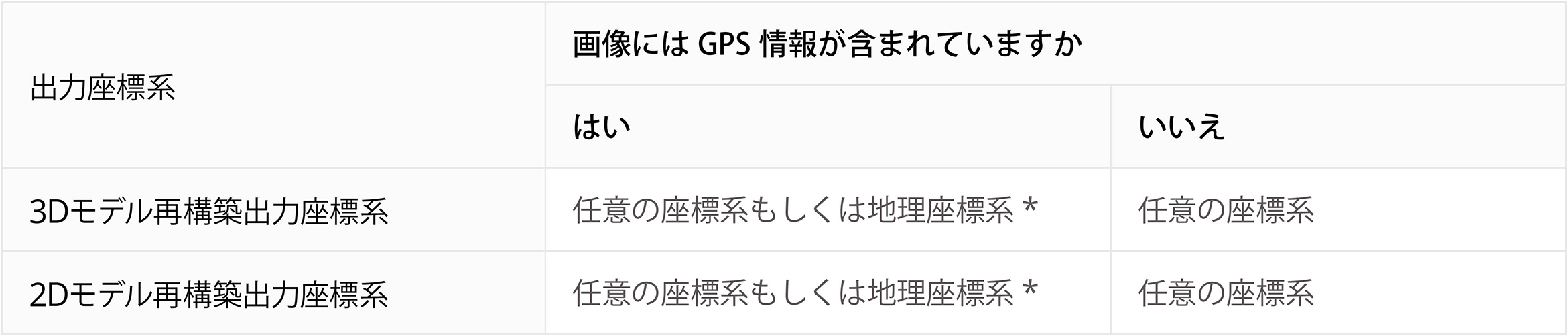
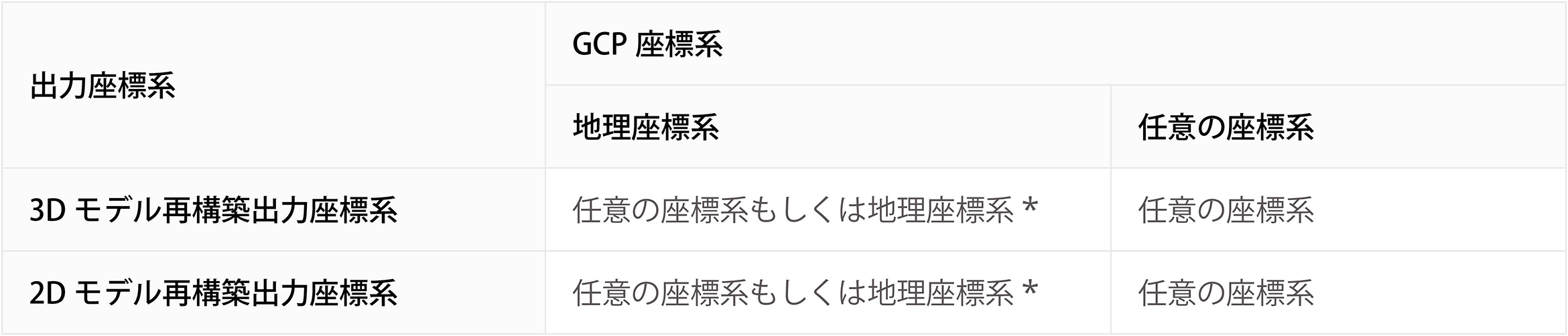
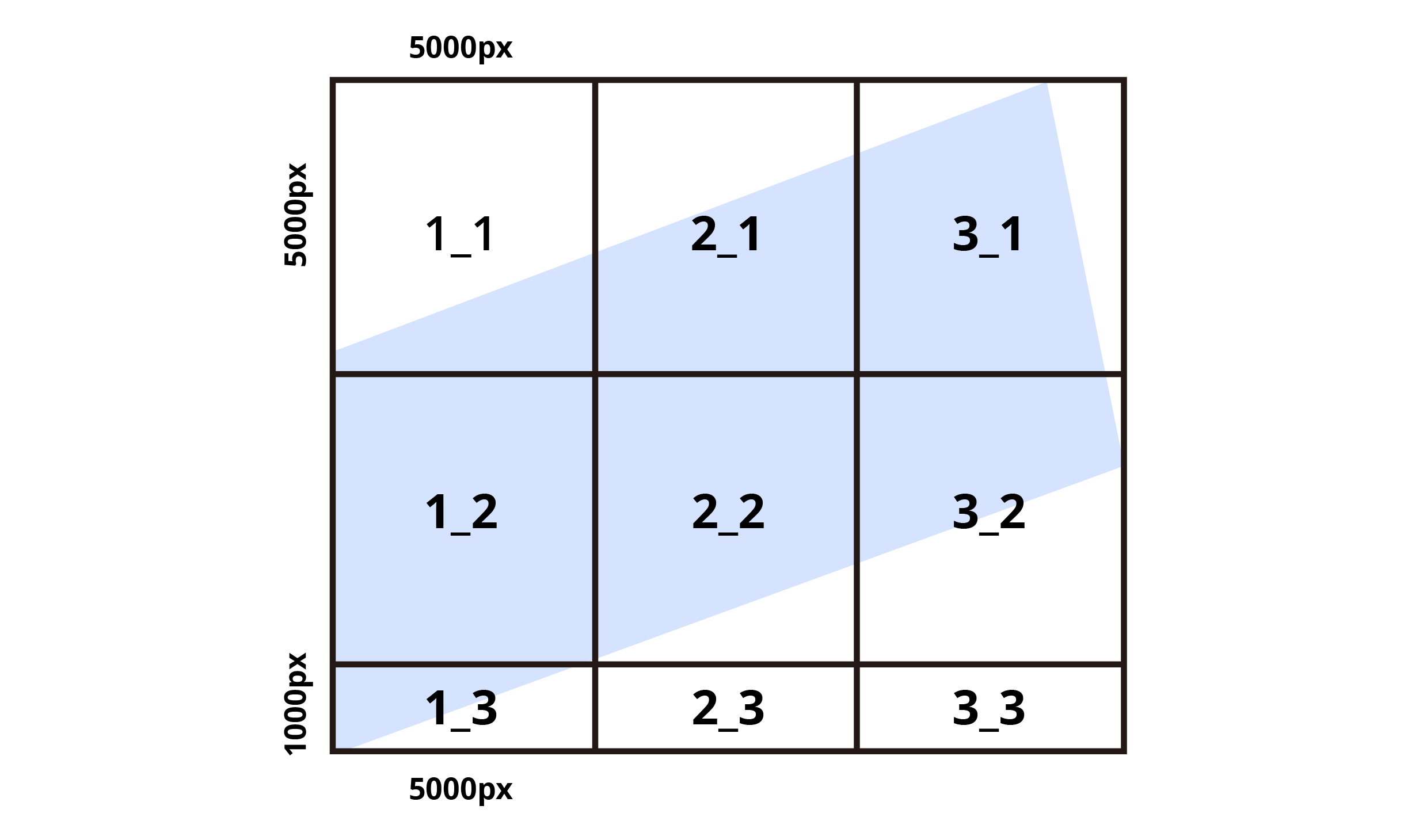
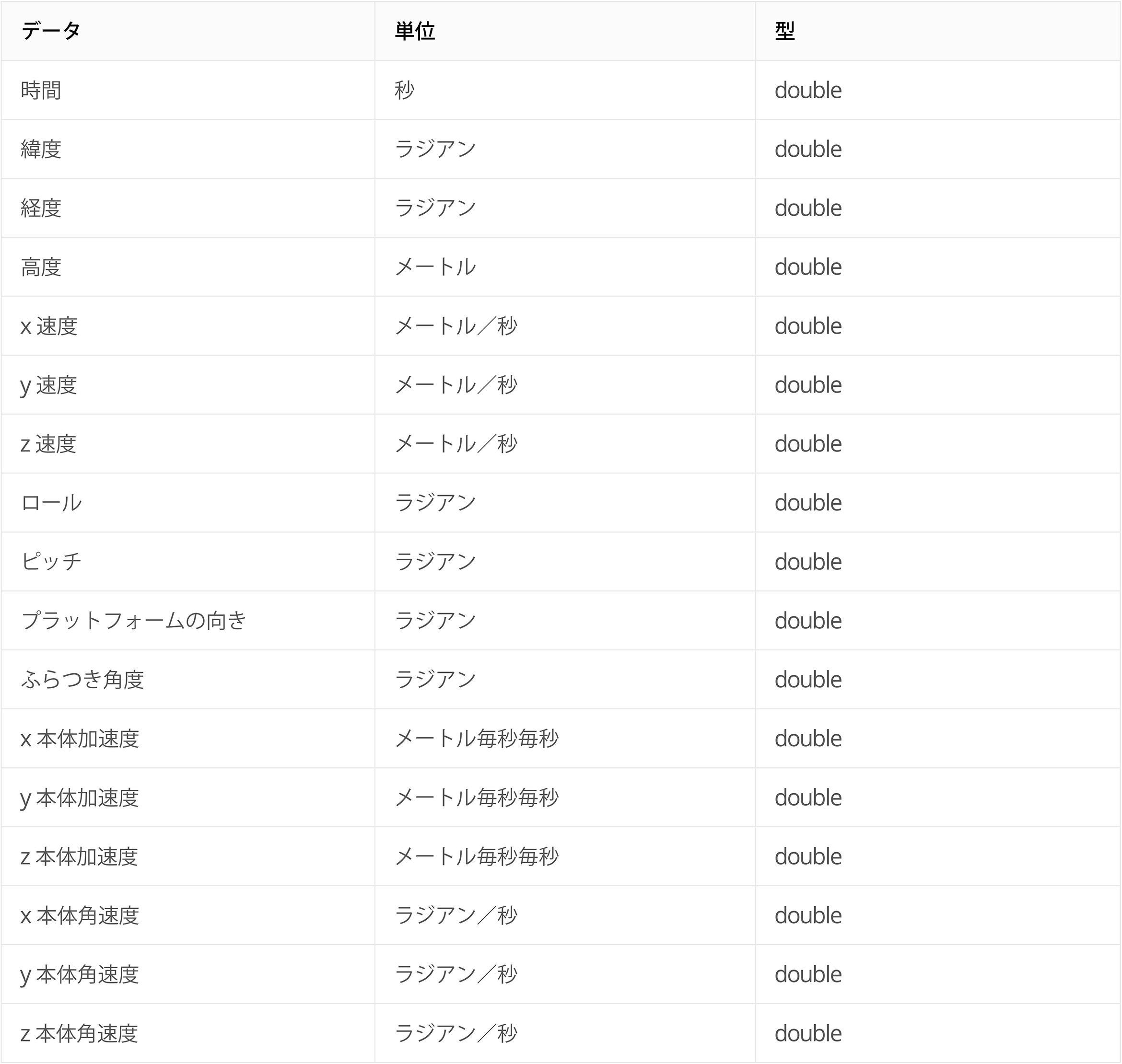
POSデータ、地上基準点、またはその両方のデータセットを組み込んで、プロジェクトで必要な対象の座標系に、高精度にジオリファレンスされた地図とモデルを直接作成します。 必要な出力フォーマットを選択するだけで、地図とモデルの座標を8500以上の主要な座標系に変換します。 ミッションの品質レポートを表示し、測定結果が精度基準を満たしているか確認することができます。 対象領域で、画像再構築は特定の対象領域に対して実施できます。同様にして、これにより処理時間を節約し効率を改善し、同時により明確なモデルと点群を生成します。
POS

GCPs

ROI
直感的で手間いらず
線/面/体積の測定に基づく様々な測定データを取得できる分析ツールは使いやすく、地形の配列全体の主な寸法を取得します。 既存のモデルの測定ラベルを編集し、進行中のプロジェクトの報告およびコミュニケーションの改善に使用できます。
注釈と測定

アノテーション

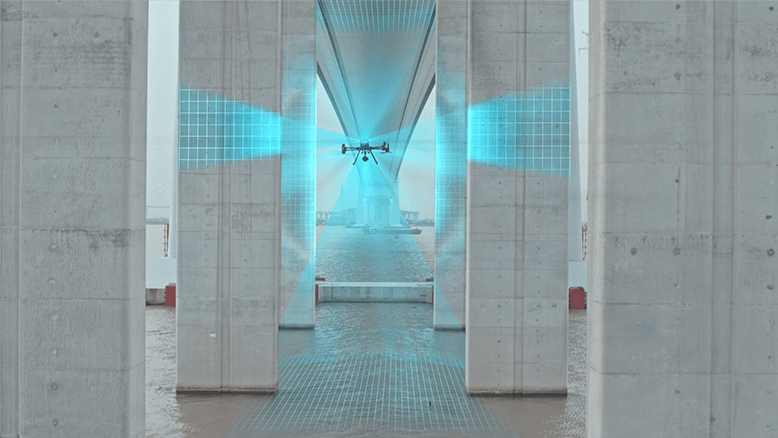
写真での点検
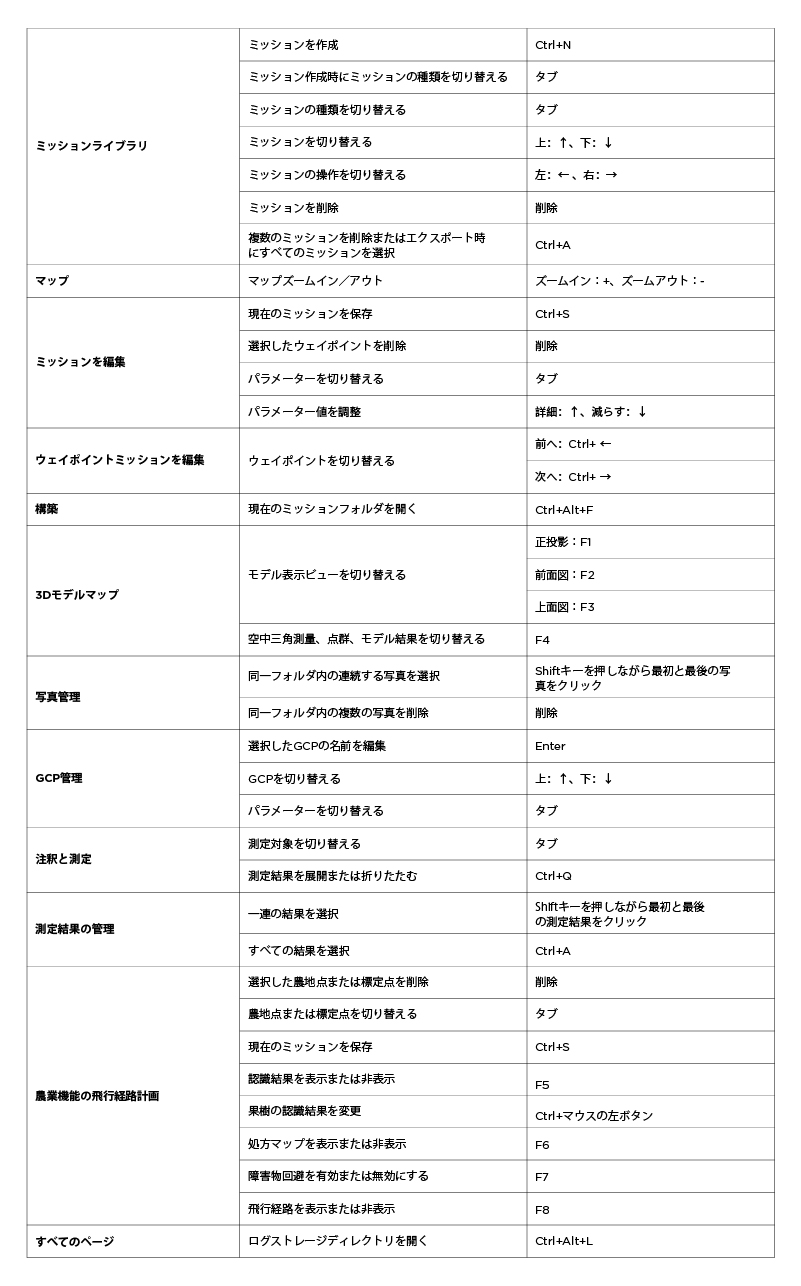
ミッション計画
事前に定義されたウェイポイントアクションと、高度/速度/ジンバルピッチ角/機体の向きなどの調整可能なパラメーターを使用して、効率的な飛行経路を作成。細心の注意が必要な複雑で狭い場所でのミッションでは、3D飛行可視化を使用して、既存の3Dモデル上にタスクを設計し、シミュレーションできます。
画面を数回タップするだけで、複雑なミッションを自動化。詳細に分析し意思決定を助けるように、様々な地図やモデルを作成するためのプロセス処理できる映像をシームレスに捉えます。
重要なオペレーションに必要不可欠なのは、精度と精緻さです。傾斜(オブリーク)機能で、傾斜した角度でカメラの角度を調整し、潤沢な3Dモデルデータセットを取得。資産を極めて鮮明に表示します。
地図上に線を引くだけで、道路や鉄道周辺を飛行する自動飛行ミッションを作成できます。マッピングされる総面積を変更するため、ミッション設定を調整し、高解像度の2Dマップと3Dモデルのどちらを作成するかを柔軟に選択したり、概要をすばやく表示したりできます。
取り巻く世界をデジタル化

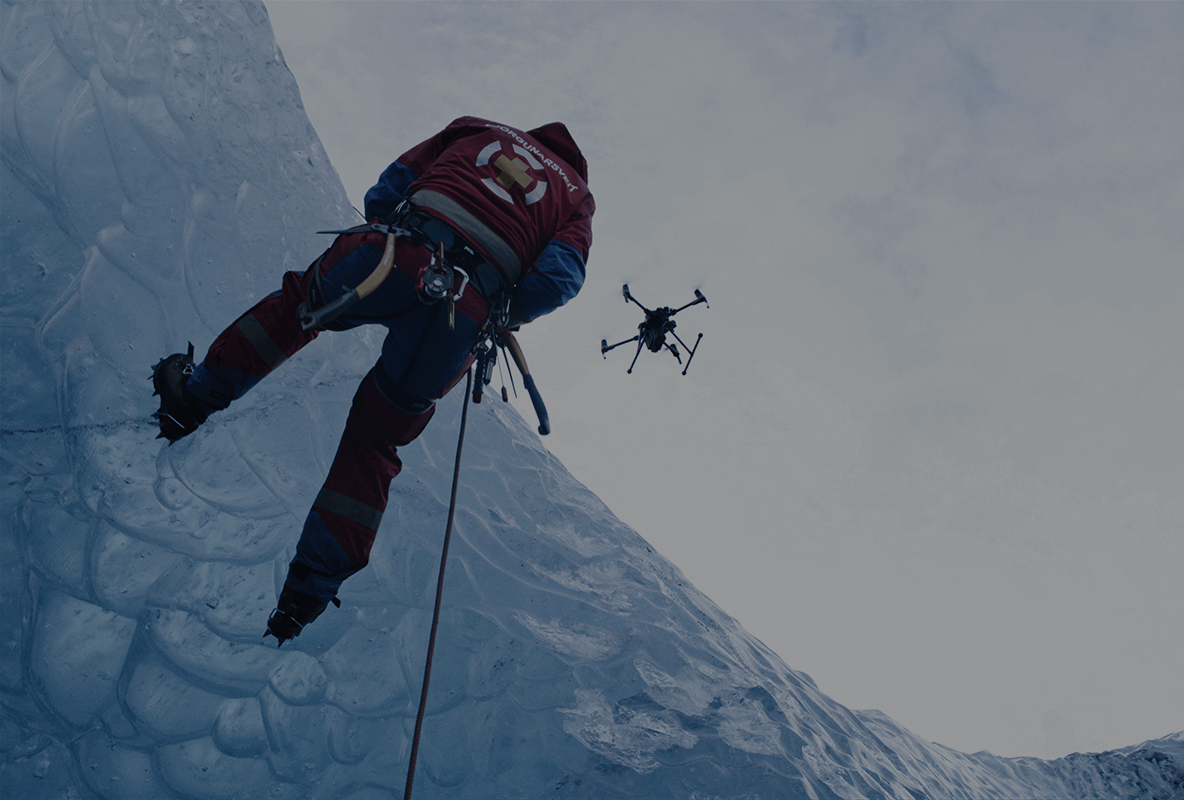
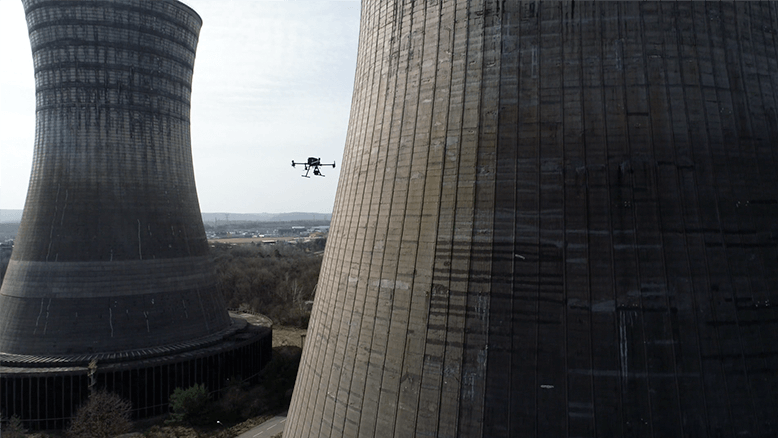
石油およびガス業界に革命を起こす
DJI Terraは、生産性を向上させながら、ビジネスコストを削減し、エネルギー業界のテクノロジーに前例のない変化をもたらすことで、現場管理、パイプライン検査、および探査業務において重要な役割を果たします。 もっと詳しく知る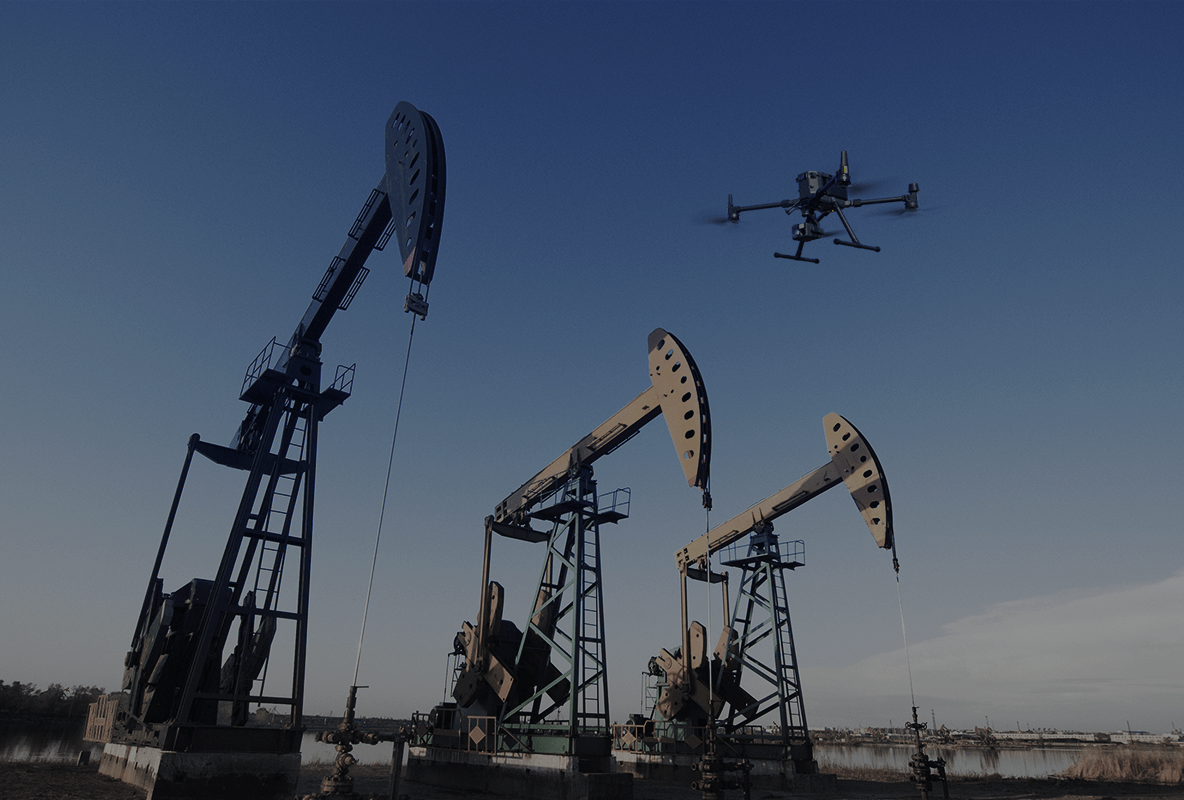
例

Terraライセンスのプラン
| 機能/バージョン | 農業 | プロ | エレクトリシティ (電力会社関連) | クラスター |
|---|---|---|---|---|
| リアルタイム 2Dマッピング |  |
|
|
|
| 農業への応用 | |
|
|
|
| 2Dモデル再構築(フィールド) | |
|
|
|
| 2Dモデルのマルチスペクトル再構築 | |
|
|
|
| KMLファイルのインポート |  |
|
|
|
| 2Dモデル再構築(都市) | |
|
|
|
| 出力座標系 | |
|
|
|
| ROI再構築 | |
|
|
|
| 画像POSのインポート | |
|
|
|
| 複数GPUによる再構築 | |
|
|
|
| 3Dモデル再構築 | |
|
|
|
| 3Dミッション計画 | |
|
|
|
| リアルタイム 3Dマッピング | |
|
|
|
| 地上基準点 | |
|
|
|
| LiDAR点群 精度最適化 | |
|
|
|
| 電気事業への応用 | |
|
|
|
| 詳細検査 | |
|
|
|
| クラスター型計算 | |
|
|
|
| 紐づけされたデバイス数 | 3台のデバイス | 1台のデバイス | 1台のデバイス | 3個のノード |
| 承認モード12 | オンライン | オンライン / オフライン | オンライン | オフライン |
| 有効期間 | 1年 | 1年/永続13(アクティベーションから1年経過した後は、ソフトウェアのアップグレードは有料になります.) | 1年 | 永続13(アクティベーションから1年経過した後は、ソフトウェアのアップグレードは有料になります.) |
| 購入方法 | お問い合わせ | 商品ページはこちら | お問い合わせ | お問い合わせ |
- 1. システム要件:Windows 7 以上(64ビット、32 GB RAM)、計算能力3.0以上のNVIDIAグラフィックカード(4 GB)。
- 2. 400 枚の画像/1GB の空きメモリの処理能力は、方向の 80% のオーバーラップ、横方向の 70% のオーバーラップ、GPS 情報を含む下向きの画像データに基づいています。これは、画像のオーバーラップとシーンのテクスチャによって異なる場合があります。
- 3. P4Rで取得した画像を高性能ワークステーションで高解像度処理。
- 4. P4R によって取得され、5 つの高性能作業ノードを備えた高性能ワークステーションで高解像度で処理された画像。
- 5. GCPを使用しない場合の再構築精度:水平方向 = 1 cm + GSDの1~2倍、垂直方向 = 2 cm + GSDの1.5~3倍。精度データは、P4RとP1によって測定された大量のデータから得られたものです。実際の精度は、RTK測位精度、現場の照明、カメラレンズ、ルート計画により影響を受ける場合があります。垂直精度とは、オブリーク画像の再構築精度を指します。
- 6. 400 枚の画像/1GB の空きメモリの処理能力は、方向の 80% のオーバーラップ、横方向の 70% のオーバーラップ、GPS 情報を含む下向きの画像データに基づいています。これは、画像のオーバーラップとシーンのテクスチャによって異なる場合があります。
- 7. P4Rで取得した画像を高性能ワークステーションで高解像度処理。
- 8. P4R によって取得され、3 つの高性能作業ノードを備えた高性能ワークステーションで高解像度で処理された画像。
- 9. 対応する機体:P4 Multispectral 対応するマルチスペクトル画像帯域: ブルー (B): 450 nm ± 16 nm、グリーン(G): 560 nm ± 16 nm、 レッド (R): 650 nm ± 16 nm、レッドエッジ (RE): 730 nm ± 16 nm、 近赤外(NIR): 840 nm ± 26 nm 対応する植生指数:NDVI、GNDVI、NDRE、LCI、OSAVIに対応。
- 10. Phantom 4 RTK (送信機), Phantom 4 Pro + V2.0 またはPhantom 4 Pro V2.0を使用している場合にのみ、使用できる機能です。
- 11. 次のモデルのみが詳細検査ミッションルートのインポートの使用をサポートしています。 (1) Phantom 4 RTK(モニターなし遠隔操作) (2) Matrice 300 RTK + H20シリーズペイロード (3) Mavic 2 Enterprise Advanced.
- 12. 以下のオンラインの機能は、オフラインモードでは利用できません。 (1)GEO区域のロック解除 (2)マップの読み込みおよび位置の検索 (3)DJIアカウントにログインしない場合、一部の飛行の制御機能は制限されます。
- 13. 永続ライセンス(買い切り版)では、アクティベーション後1年間は、無料でソフトウェアをアップグレードすることができます。アクティベーションから1年経過した後は、ソフトウェアのアップグレードは有料になります。