Zenmuse L2は、フレームベースのLiDAR、独自開発の高精度IMUシステム、4/3型CMOS RGBマッピング
カメラを一つに統合し、信頼性の高い地形データを取得できる、より高精度で高効率なDJI 飛行プラットフォームです。
DJI Terraと併用すると、3Dデータ収集や高精度の後処理を実現するターンキーソリューションとなります。

高精度
垂直精度:4 cm
水平精度:5 cm [1]

並外れた効率性
一回の飛行で2.5 km2をカバー [2]

優れた透過性
より小さいレーザースポットサイズ、より高い点群密度

検知範囲 [3]
250 m @反射率10%、100 klx
450 m @反射率50%、0 klx

5リターン

ターンキー ソリューション [4]

点群ライブビュー

DJI Terra上で ワンクリック一括処理

統合された
LiDARソリューション
パワフルなハードウェア性能により、L2では、検知範囲がさらに広がり、点群情報をより早く取得でき、複雑な対象物でも高い精度でスキャンできます。動作中、ユーザーは現場で点群モデルのプレビュー、再生、処理を行うことができます。
また、DJI
Terraは、タスク品質レポートを生成でき、シンプルなワンストップソリューションを提供し、業務全体の効率を高めます。これにより、一つの環境で後処理を行え、高精度の点群データを取得することができます。
高レベルの精度
GNSSと独自開発の高精度IMUを組み合わせ、今回、垂直精度4cm、水平精度5cmという高精度のソリューションを実現しています [1]。
並外れた効率性
電源を入れるとすぐに業務を開始でき、一度の飛行で2.5 km2 のエリアから地形データとRGBデータの両方を収集することができます [2]。

直感的な操作
Matrice 350 RTKとDJI Terraを連携し、L2は、シンプルな操作性で手軽に運用できるターンキーソリューションを実現しています。

フレームベースのLiDAR
L2は、250 m(反射率10%、100 klx)[3]と450 m(反射率50%、0 klx)[3]の範囲で検知できます。現在、標準動作高度は150 mまで伸び、業務の安全性と効率性が著しく向上しています。
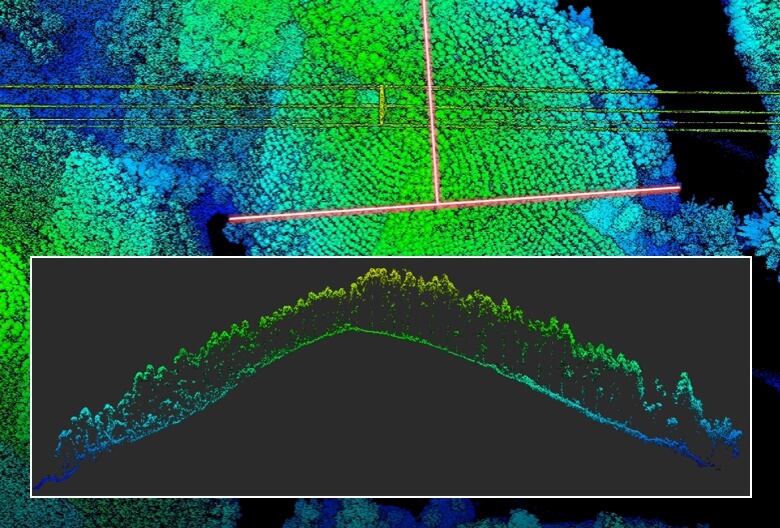
スポットサイズは4×12 cm @100 mと前モデルL1の5分の1のサイズまで小さくなり、より小さな対象物を検知し、詳細な情報を取得することができます。また、高い植生密度の環境でも透過して、より正確な数値標高モデル (DEM)を生成することも可能です。
高密度植生エリアでは、L2は、葉の下まで透過し、より多くのグラウンドポイントを捉えることができます。
シングルリターンモードと複数リターンモードの両方で、L2は、最大点群放射率240,000点/秒を達成し、より多くの点群データを一定時間内に取得することができます。
L2は2種類のスキャンモードに対応し、各ユーザーのタスク要求に応じることのできる柔軟性を実現しています。反復スキャンモードでは、L2のLiDARは高精度のマッピング要件を満たしながら、均一で高精度の点群を実現しています。非反復スキャンモードでは、より深部までの透過性を提供し、より多くの構造情報を取得可能。送電線点検、森林調査などのシナリオに最適です。
フレームベース設計により、最大100%の有効点群を生成します。3軸ジンバルと共に使用することで、調査シナリオの可能性がさらに広がります。
高精度IMUシステム
独自開発の高精度IMUシステムは、ドローンのRTK測位システムと組み合わせて、後処理中にデータを統合でき、L2は高精度の絶対位置情報、速度情報、姿勢情報にアクセスすることができます。加えて、IMUシステムは環境適応性が強化され、L2の運用信頼性や精度も向上しています。
方位精度(ヨー)[6]
リアルタイム:0.2°、後処理:0.05°
姿勢精度(ピッチ/ロール)[6]
リアルタイム:0.05°、後処理:0.025°
IMUシステムの性能が大幅に向上し、電源を入れるとすぐに使用できます。さらに、RTKがFIX状態になると、直ちに連携ドローンは業務を開始でき、現場での運用向けに最適化されています。
RGBマッピングカメラ

ピクセルサイズが3.3 μmと大きくなり、有効画素も20 MPに到達。これにより、全体の映像性能が大幅に向上し、より細部まで豊かで、現実に忠実な色合いの点群を表示することができます。写真撮影の最小間隔は、0.7秒まで高速化しています。マッピングカメラのシャッター寿命は最大20万回で、運用コストが大幅に低減されています。点群データ収集が必要ない場合でも、RGBカメラで写真や動画を撮影したり、可視光マッピング用に画像を収集することもできます。
最適化された運用体験
多様な種類の
飛行ルート
ウェイポイント、エリア、飛行帯の3種類のルートに対応し、さまざまな環境で測量ミッションを対応できます。
点群ライブビュー
運用中、DJI Pilot 2は、RGB、点群、点群/RGBの2画面表示の3種類の表示モードに対応し、より直感的な方法で業務を遂行することができます。RNGのアクティベーション(レーザー距離計)をオンにすると、LiDARモジュールとFOVの中心にある対象物の間の距離情報にアクセスでき、飛行安全性が向上します。また、反射率、高さ、距離、RGBのリアルタイム点群カラーコーディングに対応しています。
点群モデルの再生とマージ
オペレーション後は、直接、アルバムの中で3D点群モデル [7]を表示することができます。複数回の飛行より作成した3D点群モデルはマージでき、現場で、オペレーションの品質を判断することができます。
タスク品質レポートの自動生成
点群データを収集後、DJI Pilot 2アプリはタスク品質レポートを自動生成します。[8]
これにより、現場でオペレーションの結果をリアルタイムで確認できるため、
問題があった場合には素早く対応でき、不安のないフィールドワークを実現しています。
PPKソリューション
複雑なオペレーション環境では、干渉、映像伝送の接続切断などの問題により発生するRTKデータの消失を事前に避けるために、RTKベースステーションをセットアップできます。オペレーション後、オリジナルのファイルをDJITerraにインポートし、PPK(後処理キネマティック)プロセスを使用して、高精度のモデルを再構築します。
DJI Terra上でワンクリック一括処理
DJI Terraに点群データをインポートすると、効率的で信頼度の高いワンストップ後処理を実現します。点群の軌跡計算と精度の最適化後、一回クリックするだけで、標準フォーマットの3D点群モデルを生成します。DJI Terraでグラウンドポイントの種類を分類後、DEMデータを出力できます。[精度コントロール/チェック]機能を使用して、点群の品質を分析できます。
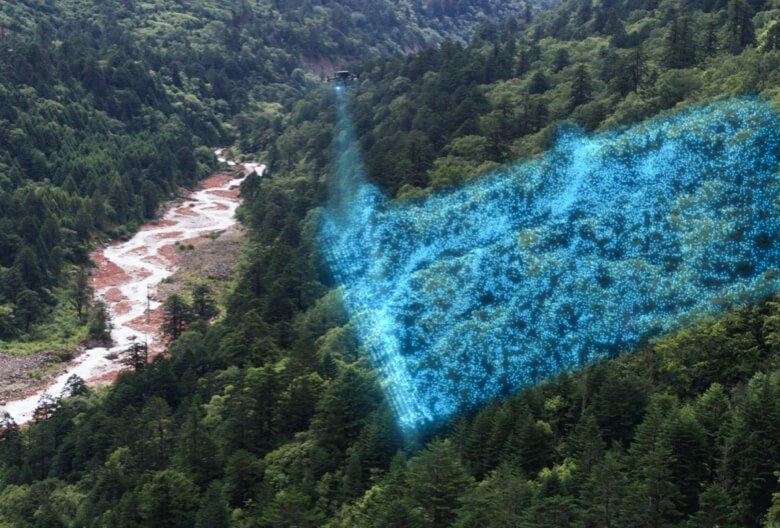
適用シナリオ
DJI Enterpriseの飛行プラットフォーム、DJI Terra、Zenmuse L2の連携により、土地測量、マッピング、電力管理、森林管理、インフラ管理などのシナリオに適用できます。




- 1. DJIのラボ環境にて、以下の条件下で測定:Zenmuse L2をMatrice 350 RTKに取り付け、電源をオン。DJI Pilot 2のエリアルートを使用し、飛行ルートを計画。(IMUのキャリブレーションが有効) RTKがFIX状態で、反復スキャンを使用。相対高度150 m、飛行速度15 m/s、ジンバルピッチ-90°、飛行ルートの各直線部は1500 m以下に設定。このフィールドには、明確な角度の特徴を持つオブジェクトが含まれており、拡散反射モデルに準拠した、露出した硬質地盤上のチェック ポイントが使用されていました。点群精度 最適化を有効にして、DJI Terraは後処理に使用されました。点群精度 最適化が無効の状態で同じ条件下で測定した場合、垂直精度は4 cmで、水平精度は8 cmです。
- 2. 以下の条件で測定:Zenmuse L2をMatrice 350 RTK上に取り付け、飛行速度15 m/s、飛行高度150 m、サイドラップ率20%、IMUキャリブレーション有効、標高最適化 オフ、地形フォロー オフ。
- 3. 提示されているデータは代表値です。レーザー光線の直径より大きいサイズの平面対象物に対して直角に入射し、大気の可視性が23 kmの環境で測定。低照度環境ではレーザー光線は最適な検知範囲を確保できます。レーザー光線が2つ以上の対象物に当たった場合は、レーザーの総伝送電力はそれぞれに分散されるので到達可能範囲は短くなります。最大検知範囲は500 mです。
- 4. 電源をオンにした後、IMUのウォーミングアップは不要です。しかし、飛行して作業を開始する前に、ユーザーはドローンのRTKがFIXの状態になるまで待つ必要があります。
- 5. 前モデルZenmuse L1との比較で計算しています。
- 6. DJIのラボ環境にて、以下の条件下で測定:Zenmuse L2をMatrice 350 RTKに取り付け、電源をオン。DJI Pilot 2のエリアルートを使用し、飛行ルートを計画。(IMUのキャリブレーションが有効) RTKはFIX状態。相対高度150 m、飛行速度15 m/s、ジンバルピッチ-90°、飛行ルートの各直線部は1500 m以下に設定。
- 7. 3Dモデルは、スパース表現に基づいて処理されています。
- 8. ウェイポイント、エリア、飛行帯のタスク品質レポートの生成にのみ対応しています。